
raspberry pi 3に「BME280を用いたPro Microの温湿度・気圧測定 プログラム」で使用した環境センサー「BME280」を接続し、C言語により温湿度・気圧データを入力してみました。また、固定IPアドレスを割り付けたraspberry pi 3の無線LANを使った場合、apt-get updateがエラーになる場合があり、この解決方法を示します。
raspberry pi 3への環境センサー「BME280」の接続
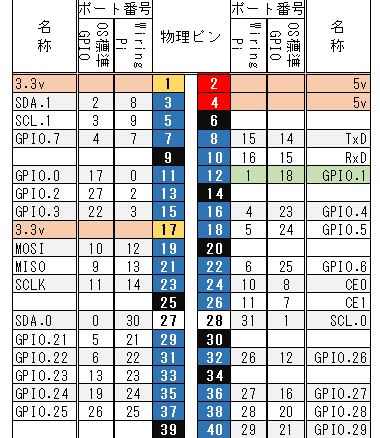
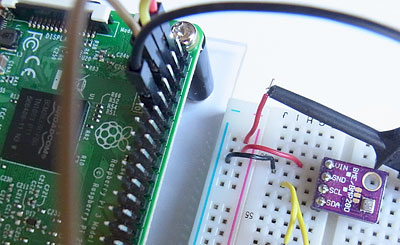
raspberry pi 3とBME280間で、I2CのSDAとSCLのそれぞれに接続します。BME280のVINにはraspberry piの3.3Vを入力します。pinの配置と接続した図を次に示します。
raspberry pi 3でのBME280の接続確認
raspberry pi 3でBME280を認識しているかを確認します。
まず、次のコマンドを入力し、メニュー画面から「8 Advanced Options」を選択して、I2Cを有効にします。
$ sudo raspi-config
次のコマンドで再起動します。
$ sudo reboot
次のコマンドでi2c-toolsをインストールします。
pi@raspberrypi:~ $ sudo apt-get install i2c-tools Reading package lists… Done Building dependency tree Reading state information… Done i2c-tools is already the newest version. 0 upgraded, 0 newly installed, 0 to remove and 79 not upgraded. pi@raspberrypi:~ $
BME280の接続を確認するため次のコマンドを入力します。DIYmall BME280のI2Cのポートは0x76になっています。
pi@raspberrypi:~ $ i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 --
環境センサー「BME280」プログラムの作成
Raspberry PIで、Cライブラリ「WiringPi」を用いて、環境センサー「BME280」を動作させました。WiringPiのインストール方法は、Raspberry PIでRTC-8564NBの時計プログラムの作成に示します。「BME280を用いたPro Microの温湿度・気圧測定 プログラム」で使用したArduinoのプログラムを、WiringPiで実行できるように移植しました。
プログラムのソースコード「bme280.c」を次に示します。
bme280.c
#include <stdio.h>
#include <wiringPi.h>
#include <wiringPiI2C.h>
#define BME280_ADDRESS 0x76
unsigned long int hum_raw,temp_raw,pres_raw;
signed long int t_fine;
unsigned int dig_T1;
int dig_T2;
int dig_T3;
unsigned int dig_P1;
int dig_P2;
int dig_P3;
int dig_P4;
int dig_P5;
int dig_P6;
int dig_P7;
int dig_P8;
int dig_P9;
char dig_H1;
int dig_H2;
char dig_H3;
int dig_H4;
int dig_H5;
char dig_H6;
static int dev;
static int init_dev(void)
{
if ((dev = wiringPiI2CSetup(BME280_ADDRESS)) == -1)
{
return 1 ;
}
return 0;
}
void getRegisters(char address, int numData, unsigned char *data) {
char adr;
int i;
adr = address;
for (i = 0; i < numData; i++) {
*data = wiringPiI2CReadReg8 (dev, adr);
// printf("adr:%x data:%x\n",adr, *data);
adr ++;
data ++;
}
}
void readTrim()
{
unsigned char data[32],i=0;
getRegisters(0x88, 24, &data[0]);
i+=24;
getRegisters(0xA1, 1, &data[i]);
i+=1;
getRegisters(0xE1, 7, &data[i]);
i+=7;
dig_T1 = (data[1] << 8) | data[0];
dig_T2 = (data[3] << 8) | data[2];
dig_T3 = (data[5] << 8) | data[4];
dig_P1 = (data[7] << 8) | data[6];
dig_P2 = (data[9] << 8) | data[8];
dig_P3 = (data[11]<< 8) | data[10];
dig_P4 = (data[13]<< 8) | data[12];
dig_P5 = (data[15]<< 8) | data[14];
dig_P6 = (data[17]<< 8) | data[16];
dig_P7 = (data[19]<< 8) | data[18];
dig_P8 = (data[21]<< 8) | data[20];
dig_P9 = (data[23]<< 8) | data[22];
dig_H1 = data[24];
dig_H2 = (data[26]<< 8) | data[25];
dig_H3 = data[27];
dig_H4 = (data[28]<< 4) | (0x0F & data[29]);
dig_H5 = (data[30] << 4) | ((data[29] >> 4) & 0x0F);
dig_H6 = data[31];
}
void writeReg(unsigned char address, unsigned char data) {
char adr;
int i;
adr = address;
wiringPiI2CWriteReg8 (dev, adr, data);
// printf("adr:%x data:%x\n",adr, data);
}
void readData()
{
int i = 0;
unsigned char data[8];
getRegisters(0xF7, 8, &data[0]);
pres_raw = data[0];
pres_raw = (pres_raw<<8) | data[1];
pres_raw = (pres_raw<<4) | (data[2] >> 4);
temp_raw = data[3];
temp_raw = (temp_raw<<8) | data[4];
temp_raw = (temp_raw<<4) | (data[5] >> 4);
hum_raw = data[6];
hum_raw = (hum_raw << 8) | data[7];
// printf("TEMP :%x DegC PRESS :%x hPa HUM :%x \n",temp_raw,pres_raw,hum_raw);
}
signed long int calibration_T(signed long int adc_T)
{
signed long int var1, var2, T;
var1 = ((((adc_T >> 3) - ((signed long int)dig_T1<<1))) * ((signed long int)dig_T2)) >> 11;
var2 = (((((adc_T >> 4) - ((signed long int)dig_T1)) * ((adc_T>>4) - ((signed long int)dig_T1))) >> 12) * ((signed long int)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
unsigned long int calibration_P(signed long int adc_P)
{
signed long int var1, var2;
unsigned long int P;
var1 = (((signed long int)t_fine)>>1) - (signed long int)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11) * ((signed long int)dig_P6);
var2 = var2 + ((var1*((signed long int)dig_P5))<<1);
var2 = (var2>>2)+(((signed long int)dig_P4)<<16);
var1 = (((dig_P3 * (((var1>>2)*(var1>>2)) >> 13)) >>3) + ((((signed long int)dig_P2) * var1)>>1))>>18;
var1 = ((((32768+var1))*((signed long int)dig_P1))>>15);
if (var1 == 0)
{
return 0;
}
P = (((unsigned long int)(((signed long int)1048576)-adc_P)-(var2>>12)))*3125;
if(P<0x80000000)
{
P = (P << 1) / ((unsigned long int) var1);
}
else
{
P = (P / (unsigned long int)var1) * 2;
}
var1 = (((signed long int)dig_P9) * ((signed long int)(((P>>3) * (P>>3))>>13)))>>12;
var2 = (((signed long int)(P>>2)) * ((signed long int)dig_P8))>>13;
P = (unsigned long int)((signed long int)P + ((var1 + var2 + dig_P7) >> 4));
return P;
}
unsigned long int calibration_H(signed long int adc_H)
{
signed long int v_x1;
v_x1 = (t_fine - ((signed long int)76800));
v_x1 = (((((adc_H << 14) -(((signed long int)dig_H4) << 20) - (((signed long int)dig_H5) * v_x1)) +
((signed long int)16384)) >> 15) * (((((((v_x1 * ((signed long int)dig_H6)) >> 10) *
(((v_x1 * ((signed long int)dig_H3)) >> 11) + ((signed long int) 32768))) >> 10) + (( signed long int)2097152)) *
((signed long int) dig_H2) + 8192) >> 14));
v_x1 = (v_x1 - (((((v_x1 >> 15) * (v_x1 >> 15)) >> 7) * ((signed long int)dig_H1)) >> 4));
v_x1 = (v_x1 < 0 ? 0 : v_x1);
v_x1 = (v_x1 > 419430400 ? 419430400 : v_x1);
return (unsigned long int)(v_x1 >> 12);
}
void main(int argc, char **argv)
{
unsigned char osrs_t = 1; //Temperature oversampling x 1
unsigned char osrs_p = 1; //Pressure oversampling x 1
unsigned char osrs_h = 1; //Humidity oversampling x 1
unsigned char mode = 3; //Normal mode
unsigned char t_sb = 5; //Tstandby 1000ms
unsigned char filter = 0; //Filter off
unsigned char spi3w_en = 0; //3-wire SPI Disable
unsigned char ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode;
unsigned char config_reg = (t_sb << 5) | (filter << 2) | spi3w_en;
unsigned char ctrl_hum_reg = osrs_h;
double temp_act = 0.0, press_act = 0.0,hum_act=0.0;
signed long int temp_cal;
unsigned long int press_cal,hum_cal;
if(init_dev()==1) return;
writeReg(0xF2,ctrl_hum_reg);
writeReg(0xF4,ctrl_meas_reg);
writeReg(0xF5,config_reg);
readTrim(); //
while(1)
{
delay(1000);
readData();
temp_cal = calibration_T(temp_raw);
press_cal = calibration_P(pres_raw);
hum_cal = calibration_H(hum_raw);
temp_act = (double)temp_cal / 100.0;
press_act = (double)press_cal / 100.0;
hum_act = (double)hum_cal / 1024.0;
printf("TEMP :%f DegC PRESS :%f hPa HUM :%f \n",temp_act,press_act,hum_act);
}
}
コンパイル・リンクは次のコマンドで実行します。
# gcc -o bme280 bme280.c -lwiringPi
作成したプログラムを次のコマンドで実行します。
# sudo ./bme280
次のように温湿度・気圧データが1秒ごとに表示されます。
root@raspberrypi:~/iotHub3gpi# gcc -o bme280 bme280.c -lwiringPi root@raspberrypi:~/iotHub3gpi# ./bme280 TEMP :24.640000 DegC PRESS :1142.670000 hPa HUM :64.587891 TEMP :24.640000 DegC PRESS :1142.730000 hPa HUM :64.587891 TEMP :24.630000 DegC PRESS :1143.040000 hPa HUM :64.598633 TEMP :24.630000 DegC PRESS :1143.070000 hPa HUM :64.598633 TEMP :24.640000 DegC PRESS :1142.790000 hPa HUM :64.587891 TEMP :24.650000 DegC PRESS :1142.280000 hPa HUM :64.610352 TEMP :24.650000 DegC PRESS :1142.320000 hPa HUM :64.610352 TEMP :24.630000 DegC PRESS :1143.330000 hPa HUM :64.608398 TEMP :24.640000 DegC PRESS :1142.880000 hPa HUM :64.598633 TEMP :24.640000 DegC PRESS :1142.880000 hPa HUM :64.609375 TEMP :24.650000 DegC PRESS :1142.350000 hPa HUM :64.599609 TEMP :24.640000 DegC PRESS :1142.510000 hPa HUM :64.587891 TEMP :24.640000 DegC PRESS :1142.550000 hPa HUM :64.565430 ^Z [8]+ Stopped ./bme280
apt-get updateがエラーになる
「apt-get update」でraspberry piをアップデートすると、次のようなエラーが出る場合があります。これは、無線LANを使用していると、内部の機器にはネットワークアクセスが可能でも、設定によっては、インターネットには接続できない場合があります。この場合、起動スクリプトを書き換える必要があります。
pi@raspberrypi:~ $ sudo apt-get update Err http://mirrordirector.raspbian.org jessie InRelease Err http://archive.raspberrypi.org jessie InRelease Err http://mirrordirector.raspbian.org jessie Release.gpg Could not resolve ‘mirrordirector.raspbian.org’ Err http://archive.raspberrypi.org jessie Release.gpg Could not resolve ‘archive.raspberrypi.org’ Reading package lists… Done W: Failed to fetch http://mirrordirector.raspbian.org/raspbian/dists/jessie/InRe lease W: Failed to fetch http://archive.raspberrypi.org/debian/dists/jessie/InRelease W: Failed to fetch http://mirrordirector.raspbian.org/raspbian/dists/jessie/Rele ase.gpg Could not resolve ‘mirrordirector.raspbian.org’ W: Failed to fetch http://archive.raspberrypi.org/debian/dists/jessie/Release.gp g Could not resolve ‘archive.raspberrypi.org’ W: Some index files failed to download. They have been ignored, or old ones used instead.
/etc/rc.localの起動スクリプトの末尾のexit 0の手前に、3行追加します。それぞれの役割は
- wlanにipアドレス割り当て
- dhcpd立ち上げ
- hostapd立ち上げ
/etc/rc.localを次のように編集します。IPアドレスは「192.168.0.50」とします。
$ sudo vi /etc/rc.local … ifconfig wlan0 192.168.0.50 netmask 255.255.255.0 up /etc/init.d/isc-dhcp-server start /etc/init.d/hostapd start exit 0