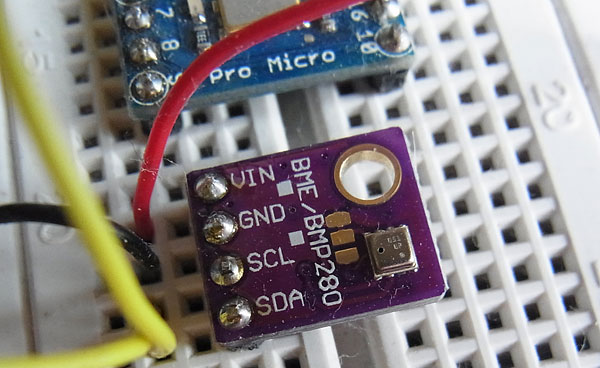
ebayで購入したPro Micro に環境センサモジュール「BME280」を接続し、温湿度・気圧を測定するプログラムを作成しました。BME280は、スイッチサイエンスや秋月電子などが販売されていますが、今回はebeyから購入しました。次に、購入した環境センサモジュール「BME280」を示します。
Pro Microと環境センサモジュール「BME280」の接続
Pro Microと環境センサモジュール「BME280」間は、I2Cインタフェースで接続します。次のように各ピンを接続します。左側のピン番号がBME280で右側のピン番号がPro Microです。環境センサモジュール「BME280」もいろいろなバージョンがあるようで、購入したBME280は4ピンのインタフェースを持ち、本来BME280が持つSPIインタフェースは使用できません。チップIDは「0x60」、I2Cアドレスは「0x76」となっています。
- VIN -> 3.3V
- GND -> GND
- SDA -> D2
- SCL -> D3
BME280による温湿度・気圧測定プログラムの作成
BME280による温湿度・気圧測定プログラムは「スイッチサイエンスのBME280公開リポジトリ」からダウンロードしました。
BME280.ino
#include <Wire.h>
#define BME280_ADDRESS 0x76
unsigned long int hum_raw,temp_raw,pres_raw;
signed long int t_fine;
uint16_t dig_T1;
int16_t dig_T2;
int16_t dig_T3;
uint16_t dig_P1;
int16_t dig_P2;
int16_t dig_P3;
int16_t dig_P4;
int16_t dig_P5;
int16_t dig_P6;
int16_t dig_P7;
int16_t dig_P8;
int16_t dig_P9;
int8_t dig_H1;
int16_t dig_H2;
int8_t dig_H3;
int16_t dig_H4;
int16_t dig_H5;
int8_t dig_H6;
void setup()
{
uint8_t osrs_t = 1; //Temperature oversampling x 1
uint8_t osrs_p = 1; //Pressure oversampling x 1
uint8_t osrs_h = 1; //Humidity oversampling x 1
uint8_t mode = 3; //Normal mode
uint8_t t_sb = 5; //Tstandby 1000ms
uint8_t filter = 0; //Filter off
uint8_t spi3w_en = 0; //3-wire SPI Disable
uint8_t ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode;
uint8_t config_reg = (t_sb << 5) | (filter << 2) | spi3w_en;
uint8_t ctrl_hum_reg = osrs_h;
Serial.begin(9600);
Wire.begin();
writeReg(0xF2,ctrl_hum_reg);
writeReg(0xF4,ctrl_meas_reg);
writeReg(0xF5,config_reg);
readTrim(); //
}
void loop()
{
double temp_act = 0.0, press_act = 0.0,hum_act=0.0;
signed long int temp_cal;
unsigned long int press_cal,hum_cal;
readData();
temp_cal = calibration_T(temp_raw);
press_cal = calibration_P(pres_raw);
hum_cal = calibration_H(hum_raw);
temp_act = (double)temp_cal / 100.0;
press_act = (double)press_cal / 100.0;
hum_act = (double)hum_cal / 1024.0;
Serial.print("TEMP : ");
Serial.print(temp_act);
Serial.print(" DegC PRESS : ");
Serial.print(press_act);
Serial.print(" hPa HUM : ");
Serial.print(hum_act);
Serial.println(" %");
delay(1000);
}
void readTrim()
{
uint8_t data[32],i=0;
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0x88);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,24);
while(Wire.available()){
data[i] = Wire.read();
i++;
}
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0xA1);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,1);
data[i] = Wire.read();
i++;
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0xE1);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,7);
while(Wire.available()){
data[i] = Wire.read();
i++;
}
dig_T1 = (data[1] << 8) | data[0];
dig_T2 = (data[3] << 8) | data[2];
dig_T3 = (data[5] << 8) | data[4];
dig_P1 = (data[7] << 8) | data[6];
dig_P2 = (data[9] << 8) | data[8];
dig_P3 = (data[11]<< 8) | data[10];
dig_P4 = (data[13]<< 8) | data[12];
dig_P5 = (data[15]<< 8) | data[14];
dig_P6 = (data[17]<< 8) | data[16];
dig_P7 = (data[19]<< 8) | data[18];
dig_P8 = (data[21]<< 8) | data[20];
dig_P9 = (data[23]<< 8) | data[22];
dig_H1 = data[24];
dig_H2 = (data[26]<< 8) | data[25];
dig_H3 = data[27];
dig_H4 = (data[28]<< 4) | (0x0F & data[29]);
dig_H5 = (data[30] << 4) | ((data[29] >> 4) & 0x0F);
dig_H6 = data[31];
}
void writeReg(uint8_t reg_address, uint8_t data)
{
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(reg_address);
Wire.write(data);
Wire.endTransmission();
}
void readData()
{
int i = 0;
uint32_t data[8];
Wire.beginTransmission(BME280_ADDRESS);
Wire.write(0xF7);
Wire.endTransmission();
Wire.requestFrom(BME280_ADDRESS,8);
while(Wire.available()){
data[i] = Wire.read();
i++;
}
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4);
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4);
hum_raw = (data[6] << 8) | data[7];
}
signed long int calibration_T(signed long int adc_T)
{
signed long int var1, var2, T;
var1 = ((((adc_T >> 3) - ((signed long int)dig_T1<<1))) * ((signed long int)dig_T2)) >> 11;
var2 = (((((adc_T >> 4) - ((signed long int)dig_T1)) * ((adc_T>>4) - ((signed long int)dig_T1))) >> 12) * ((signed long int)dig_T3)) >> 14;
t_fine = var1 + var2;
T = (t_fine * 5 + 128) >> 8;
return T;
}
unsigned long int calibration_P(signed long int adc_P)
{
signed long int var1, var2;
unsigned long int P;
var1 = (((signed long int)t_fine)>>1) - (signed long int)64000;
var2 = (((var1>>2) * (var1>>2)) >> 11) * ((signed long int)dig_P6);
var2 = var2 + ((var1*((signed long int)dig_P5))<<1);
var2 = (var2>>2)+(((signed long int)dig_P4)<<16);
var1 = (((dig_P3 * (((var1>>2)*(var1>>2)) >> 13)) >>3) + ((((signed long int)dig_P2) * var1)>>1))>>18;
var1 = ((((32768+var1))*((signed long int)dig_P1))>>15);
if (var1 == 0)
{
return 0;
}
P = (((unsigned long int)(((signed long int)1048576)-adc_P)-(var2>>12)))*3125;
if(P<0x80000000)
{
P = (P << 1) / ((unsigned long int) var1);
}
else
{
P = (P / (unsigned long int)var1) * 2;
}
var1 = (((signed long int)dig_P9) * ((signed long int)(((P>>3) * (P>>3))>>13)))>>12;
var2 = (((signed long int)(P>>2)) * ((signed long int)dig_P8))>>13;
P = (unsigned long int)((signed long int)P + ((var1 + var2 + dig_P7) >> 4));
return P;
}
unsigned long int calibration_H(signed long int adc_H)
{
signed long int v_x1;
v_x1 = (t_fine - ((signed long int)76800));
v_x1 = (((((adc_H << 14) -(((signed long int)dig_H4) << 20) - (((signed long int)dig_H5) * v_x1)) +
((signed long int)16384)) >> 15) * (((((((v_x1 * ((signed long int)dig_H6)) >> 10) *
(((v_x1 * ((signed long int)dig_H3)) >> 11) + ((signed long int) 32768))) >> 10) + (( signed long int)2097152)) *
((signed long int) dig_H2) + 8192) >> 14));
v_x1 = (v_x1 - (((((v_x1 >> 15) * (v_x1 >> 15)) >> 7) * ((signed long int)dig_H1)) >> 4));
v_x1 = (v_x1 < 0 ? 0 : v_x1);
v_x1 = (v_x1 > 419430400 ? 419430400 : v_x1);
return (unsigned long int)(v_x1 >> 12);
}
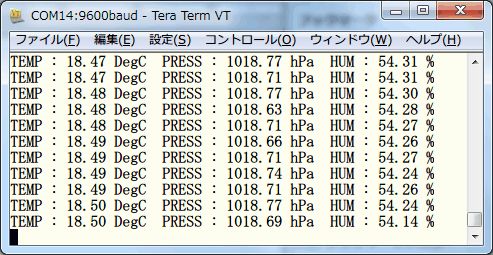
BME280による温湿度・気圧測定プログラムの実行
作成した温湿度・気圧測定プログラムをPro Microに書き込み、実行すると、パソコン上で実行しているTeratermには次のような温湿度と気圧の測定値が表示されます。