
ebayで購入したPro Micro にデジタルコンパス・加速度センサ「LSM303DLH」を接続し、デジタルコンパス・加速度を入力プログラムを作成しました。LSM303DLHは、スイッチサイエンスや秋月電子などが販売されていますが、今回はebeyから購入しました。次に、購入したデジタルコンパス・加速度センサ「LSM303DLH」を示します。
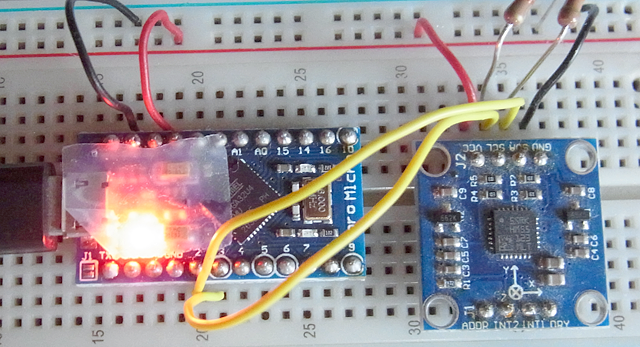
Pro Microとデジタルコンパス・加速度センサ「LSM303DLH」の接続
Pro Microとデジタルコンパス・加速度センサ「LSM303DLH」間は、I2Cインタフェースで接続します。次のように各ピンを接続します。左側のピン番号がLSM303DLHで右側のピン番号がPro Microです。
- VCC(3~5V) -> VCC
- GND -> GND
- SDA -> D2
- SCL -> D3
- SDA,SCLを10kΩでプルアップ
Arduinoの標準では信号線はプルアップは行われていますが、ProMicroのI2Cの信号線はプルアップされていません。
「Pro MicroによるOLEDディスプレイ への表示」で作成したi2c_scanner1によりI2 Cのアドレスを確認します。
I2C Scanner
0 1 2 3 4 5 6 7 8 9 A B C D E F
00: xx xx xx xx xx xx xx xx -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- 18 -- -- -- -- -- 1E --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- xx xx xx xx xx xx xx xx
I2Cアドレスは、「0x18」が加速度センサー、「0x1e 」がデジタルコンパスになっていました。
LSM303DLHによるデジタルコンパス・加速度プログラムの作成
LSM303DLHによるデジタルコンパス・加速度プログラムを次に示します。LSM303DLHのライブラリは「Arduino library for Pololu LSM303 boards」で提供されていますが、今回はArduinoのI2Cライブラリ「Wire」を使って、LSM303DLHのレジスタに設定していきます。
- 50行目から55行目で加速度加速度センサーからのデータを取得します。データは12ビット長でリトルエンディアンで設定されています。
- 61行目から66行目でデジタルコンパスからのデータを取得します。データは16ビット長でビッグエンディアンで設定されています。z軸のデータは、y軸のデータの前に取得します
Serial.ino
#include <Wire.h>
#define SDA 4
#define SCL 5
int compass_a_x, compass_a_y, compass_a_z;
int compass_m_x, compass_m_y, compass_m_z;
char report[80];
void setup()
{
Serial.begin(9600);
while ( !Serial ) {
}
Wire.begin();
compass_init();
}
void loop()
{
compass_read();
snprintf(report, sizeof(report), "A: %6d %6d %6d M: %6d %6d %6d",
compass_a_x, compass_a_y, compass_a_z,
compass_m_x, compass_m_y, compass_m_z);
Serial.println(report);
delay(1000);
}
void compass_init() {
Wire.beginTransmission(0x18);
Wire.write(0x20);
Wire.write(0x27);
Wire.endTransmission();
Wire.beginTransmission(0x1E);
Wire.write(0x02);
Wire.write(0x00);
Wire.endTransmission();
}
void compass_read() {
Wire.beginTransmission(0x18);
Wire.write(0x28 | 0x80);
Wire.endTransmission();
Wire.requestFrom(0x18, 6);
byte b = Wire.read();
compass_a_x = (int16_t)(Wire.read() << 8 | b);
b = Wire.read();
compass_a_y = (int16_t)(Wire.read() << 8 | b);
b = Wire.read();
compass_a_z = (int16_t)(Wire.read() << 8 | b);
Wire.beginTransmission(0x1e);
Wire.write(0x03);
Wire.endTransmission();
Wire.requestFrom(0x1e, 6);
b = Wire.read();
compass_m_x = (int16_t)(b << 8 | Wire.read());
b = Wire.read();
compass_m_z = (int16_t)(b << 8 | Wire.read());
b = Wire.read();
compass_m_y = (int16_t)(b << 8 | Wire.read());
}
LSM303DLHによるデジタルコンパス・加速度プログラムの実行
作成したデジタルコンパス・加速度プログラム「Serial.ino」をPro Microに書き込み、実行すると、パソコン上で実行しているTeratermには、次のような加速度センサX/Y/Z、デジタルコンパスX/Y/Zの値(計6軸)のデータが表示されます。
A: -304 128 -1 M: -1 -1 -1 A: -464 128 16448 M: -119 -35 -405 A: -400 160 16400 M: -114 -32 -404 A: -352 224 16416 M: -113 -29 -397 A: -384 144 16400 M: -115 -39 -399 A: -384 192 16400 M: -116 -33 -399 A: -400 176 16448 M: -115 -40 -399 A: -352 128 16448 M: -117 -27 -396 A: -384 208 16448 M: -114 -33 -404 A: -352 128 16384 M: -117 -35 -400 A: -400 192 16448 M: -120 -30 -399 A: -288 192 16336 M: -112 -30 -388 A: -384 160 16480 M: -121 -35 -398 A: -400 128 16368 M: -114 -40 -400 A: -400 240 16304 M: -139 -29 -393 A: -432 48 16336 M: -180 -29 -374 A: -352 80 16464 M: -199 -26 -361 A: -400 208 16464 M: -210 -29 -350 A: -496 128 16448 M: -229 -31 -339 A: -384 160 16464 M: -253 -26 -318 A: -336 288 16464 M: -255 -32 -323