
「Ubuntuへの Vitis AIのインストール・セットアップ」でVitis AIのインストール・セットアップを行い、サンプルコードをコンパイルしました。今回はKRIA KV260 Vision Starter Kitで、「Vitis AI ユーザー ガイド(UG1414 (v1.4) 2021 年 7 月 22 日)」「Vitis AI ライブラリ ユーザーガイド(UG1354 (v1.4) 2021 年 7 月 22 日」を参照して、コンパイルしたサンプルコードを実行します。
KRIA KV260 Vision Starter KitとWindows10間でSCPによるファイル転送のために「WinSCP」を使用します
KRIA KV260 Vision Starter Kitのセットアップ
OS イメージを「xilinx-kv260-dpu-v2020.2-v1.4.0.img.gz」からダウンロードして SDカードに書き込みます。ダウンロードしたファイル名を次に示します。

次の手順に従ってKRIA KV260 Vision Starter Kitを起動します。
- 電源を接続します (12V ~ 5A)。
- SSHがデフォルトで有効になっているためにケーブルでネットワークに接続します、その他の必要なペリフェラルも接続します。
- 電源を入れて、システムを起動します。
- システムにログインします(ID、パスワード共「petalinux」)。
- 最初の起動時に、システムはいくつかの設定を実行します。これらの設定は、再起動後に有効になります。
モデル ライブラリのインストールフォルダ
すでにKRIA KV260 Vision Starter Kitには、すべてのモデルが「/usr/share/vitis_ai_library/models/」に格納されていす。各モデルは、デフォルトで次のファイルを含む個別のフォルダーに格納されます。
- [model_name].xmodel
- [model_name].prototxt
モデル「yolov3_voc_tf」の内容を次に示します。サンプルコード「yolov3」を次に示します。

ちなみに、コンパイルしたサンプルコードも含まれています。
KRIA KV260 Vision Starter Kitに Vitis AI ランタイムをインストール
パッケージ「vitis-ai-runtime-1.4.0.tar.gz」をダウンロードします。ダウンロードしたパッケージを展開し、WinSCPを使用してフォルダ「xx\vitis-ai-runtime-1.4.0.tar\vitis-ai-runtime-1.4.0\2020.2\aarch64\centos」をKRIA KV260のフォルダ「~/centos」にコピーします(フォルダ「centos」は作成します)。
Vitis AI ランタイムをインストールします。次のコマンドを順番に実行します。
$ cd ~/centos $ sudo bash setup.sh
インストールが完了すると、フォルダ「/usr/lib」に 次のVitis AI ランタイム ライブラリがインストールされます。
libunilog* libxir* libtarget-factory* libvart* libvitis_ai_library*
KRIA KV260 Vision Starter KitでVitis AI サンプルの実行
usbカメラ(ロジクールウェブカメラC920n)をKRIA KV260 Vision Starter Kitに接続して、次のコマンドを実行します。/dev/video0と/dev/video1がusbカメラになります。
$ ls /dev autofs mtd4 ptyba ptyp7 ptyt4 ptyx1 ram8 tty51 ttyc7 ttyq4 ttyu1 ttyxe block mtd4ro ptybb ptyp8 ptyt5 ptyx2 ram9 tty52 ttyc8 ttyq5 ttyu2 ttyxf ・・・ mtd12 ptyad ptyea ptys7 ptyw4 ram1 tty4 ttyba ttyp7 ttyt4 ttyx1 vcsu mtd12ro ptyae ptyeb ptys8 ptyw5 ram10 tty40 ttybb ttyp8 ttyt5 ttyx2 vcsu1 mtd13 ptyaf ptyec ptys9 ptyw6 ram11 tty41 ttybc ttyp9 ttyt6 ttyx3 vcsu2 mtd13ro ptyb0 ptyed ptysa ptyw7 ram12 tty42 ttybd ttypa ttyt7 ttyx4 vhci mtd14 ptyb1 ptyee ptysb ptyw8 ram13 tty43 ttybe ttypb ttyt8 ttyx5 video0 mtd14ro ptyb2 ptyef ptysc ptyw9 ram14 tty44 ttybf ttypc ttyt9 ttyx6 video1 mtd15 ptyb3 ptyp0 ptysd ptywa ram15 tty45 ttyc0 ttypd ttyta ttyx7 watchdog mtd15ro ptyb4 ptyp1 ptyse ptywb ram2 tty46 ttyc1 ttype ttytb ttyx8 watchdog0 mtd1ro ptyb5 ptyp2 ptysf ptywc ram3 tty47 ttyc2 ttypf ttytc ttyx9 watchdog1
usbカメラの接続を次のコマンドで確認します。「Bus 001 Device 003: ID 046d:08e5 Logitech, Inc」として認識しています。
$ lsusb Bus 002 Device 002: ID 0424:5744 Standard Microsystems Corp. USB5744 Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 001 Device 004: ID 0424:2740 Standard Microsystems Corp. Bus 001 Device 003: ID 046d:08e5 Logitech, Inc. Bus 001 Device 002: ID 0424:2744 Standard Microsystems Corp. USB2744 Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
サンプルで使用する画像とビデオが含まれるパッケージ「vitis_ai_runtime_r1.4.0_image_video.tar.gz 」、「vitis_ai_library_r1.4.0_images.tar.gz 」、「vitis_ai_library_r1.4.0_video.tar.gz」をダウンロードします。ダウンロードしたパッケージを、WinSCPを使用してKRIA KV260 Vision Starter Kitのフォルダ「~」にコピーします。
画像データを展開するフォルダを作成します。
$ mkdir Vitis-AI/demo/VART $ mkdir Vitis-AI/demo/Vitis-AI-Library
画像データを展開します。
$ cd ~ $ tar -xzvf vitis_ai_runtime_r1.4.0_image_video.tar.gz -C ~/Vitis-AI/demo/VART/ $ tar -xzvf vitis_ai_library_r1.4.0_images.tar.gz -C ~/Vitis-AI/demo/Vitis-AI-Library/ $ tar -xzvf vitis_ai_library_r1.4.0_video.tar.gz -C ~/Vitis-AI/demo/Vitis-AI-Library/
HDMIで接続されたモニタの環境変数を設定します。
$ export DISPLAY=:0.0 $ xrandr --output DP-1 --mode 640x480
1.resnet50
次の画像を対象にしてresnet50します。
【Vitis-AI/demo/VART/images/001.jpg】

実行コマンドとその結果を示します。
$ cd ~/Vitis-AI/demo/VART/resnet50 $ ./resnet50 /usr/share/vitis_ai_library/models/resnet50/resnet50.xmodel WARNING: Logging before InitGoogleLogging() is written to STDERR I0106 18:22:34.858851 1431 main.cc:292] create running for subgraph: subgraph_conv1 Image : 001.jpg top[0] prob = 0.982662 name = brain coral top[1] prob = 0.008502 name = coral reef top[2] prob = 0.006621 name = jackfruit, jak, jack top[3] prob = 0.000543 name = puffer, pufferfish, blowfish, globefish top[4] prob = 0.000330 name = eel (Classification of ResNet50:1431): dbind-WARNING **: 18:22:35.174: Couldn't register with accessibility bus: Did not receive a reply. Possible causes include: the remote application did not send a reply, the message bus security policy blocked the reply, the reply timeout expired, or the network connection was broken.
2.facedetect
画像の顔検出を行います。
$ cd ~/Vitis-AI/demo/Vitis-AI-Library/samples/facedetect $ ./test_jpeg_facedetect densebox_320_320 sample_facedetect.jpg WARNING: Logging before InitGoogleLogging() is written to STDERR I0106 18:31:30.294142 1443 demo.hpp:1183] batch: 0 image: sample_facedetect.jpg I0106 18:31:30.297333 1443 process_result.hpp:25] 1.00007 0.53125 0.1 0.1375 0.1625 I0106 18:31:30.303788 1443 process_result.hpp:25] 1.00007 0.190625 0.14375 0.146875 0.159375


$ ./test_jpeg_facedetect densebox_320_320 009.jpg WARNING: Logging before InitGoogleLogging() is written to STDERR I0106 18:32:10.615226 1449 demo.hpp:1183] batch: 0 image: 009.jpg I0106 18:32:10.618405 1449 process_result.hpp:25] 1.00007 0.26875 0.134375 0.321875 0.403125


動画形式「.webm」の動画「AGDRec.webm」で顔検出を行います。-t は
$ ./test_video_facedetect densebox_320_320 AGDRec.webm -t 8 WARNING: Logging before InitGoogleLogging() is written to STDERR I0107 00:16:41.266403 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.273351 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.279839 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.286430 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.293243 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.299634 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.306118 1408 demo.hpp:744] DPU model size=320x320 I0107 00:16:41.312674 1408 demo.hpp:744] DPU model size=320x320 (test_video_facedetect:1408): dbind-WARNING **: 00:16:41.397: Couldn't register with accessibility bus: Did not receive a reply. Possible causes include: the remote application did not send a reply, the message bus security policy blocked the reply, the reply timeout expired, or the network connection was broken.
- 理由は分かりませんが、petalinuxをrebootすると正常に処理された動画が、HDMIで接続されたモニタに表示されます。
- 公式のシステム イメージは、webm または raw 形式のビデオ ファイル入力のみをサポートします。その他の形式のビデオ ファイルを入力として使用する場合は、ffmpeg パッケージなどの関連するパッケージをシステムにインストールする必要があります。
- 動画ファイル形式「mp4」から「webm」への変換は「XMedia Recode 64bit」を使用しました。
USBカメラ(デバイス「0」)を使って顔検出を行います。
$ ./test_video_facedetect densebox_320_320 0 -t 8 ** (test_video_facedetect:1458): CRITICAL **: 00:20:41.743: gst_v4l2_object_destroy: assertion 'v4l2object != NULL' failed WARNING: Logging before InitGoogleLogging() is written to STDERR I0107 00:20:42.427712 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.434041 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.439918 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.445868 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.452164 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.458155 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.464027 1458 demo.hpp:744] DPU model size=320x320 I0107 00:20:42.470372 1458 demo.hpp:744] DPU model size=320x320 (test_video_facedetect:1458): dbind-WARNING **: 00:20:42.502: Couldn't register with accessibility bus: Did not receive a reply. Possible causes include: the remote application did not send a reply, the message bus security policy blocked the reply, the reply timeout expired, or the network connection was broken.
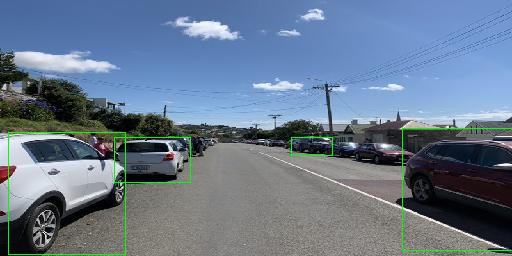
3.yolov3
画像の物体検出(車)を行います。
$ cd ~/Vitis-AI/demo/Vitis-AI-Library/samples/yolov3 $ ./test_jpeg_yolov3 yolov3_voc_tf sample_yolov3.jpg WARNING: Logging before InitGoogleLogging() is written to STDERR I0107 00:26:25.157920 1497 demo.hpp:1183] batch: 0 image: sample_yolov3.jpg I0107 00:26:25.158097 1497 process_result.hpp:44] RESULT: 6 8.90686 132.615 125.361 254.461 0.999112 I0107 00:26:25.158208 1497 process_result.hpp:44] RESULT: 6 114.067 137.168 190.375 182.825 0.970534 I0107 00:26:25.158250 1497 process_result.hpp:44] RESULT: 6 402.753 128.378 512 250.224 0.666963 I0107 00:26:25.158293 1497 process_result.hpp:44] RESULT: 6 291.458 137.144 332.074 155.318 0.377197

動画形式「.webm」の動画「traffic.webm」で物体検出(車)を行います。-t は
$ ./test_video_yolov3 yolov3_voc_tf traffic.webm -t 8 WARNING: Logging before InitGoogleLogging() is written to STDERR I0107 00:33:57.898650 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:58.234637 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:58.569655 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:58.909137 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:59.246949 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:59.583168 1415 demo.hpp:744] DPU model size=416x416 I0107 00:33:59.919138 1415 demo.hpp:744] DPU model size=416x416 I0107 00:34:00.259500 1415 demo.hpp:744] DPU model size=416x416 (test_video_yolov3:1415): dbind-WARNING **: 00:34:00.534: Couldn't register with accessibility bus: Did not receive a reply. Possible causes include: the remote application did not send a reply, the message bus security policy blocked the reply, the reply timeout expired, or the network connection was broken.