
SensorTagで使用されている圧力センサー「T5400」は、object temperatureとthe ambient temperatureの2種類の温度データも取得できます。SensorTagの気圧センサー「T5400」は、最少時間「2ms」で更新されます。
SensorTagの 圧力センサーへのデータアクセス
ハンドルを用いたSensorTagの 圧力センサー「T5400」(U4)への問い合わせは、次のテーブルに従います。
| Type | UUID | Handle | Read/Write | Format |
|---|---|---|---|---|
| <Data> | F000AA41 * | 0×4b | Read only | TempLSB TempMSB PressLSB PressMSB (4 bytes) |
| <Data Notification> | 0×4c | R/W | 2 bytes | |
| <Configuration> | F000AA42 * | 0×4f | R/W | 1 byte |
| <Calibration> | 0×52 | Read only | C1LSB C1MSB…C8LSB C8MSB (16 bytes) |
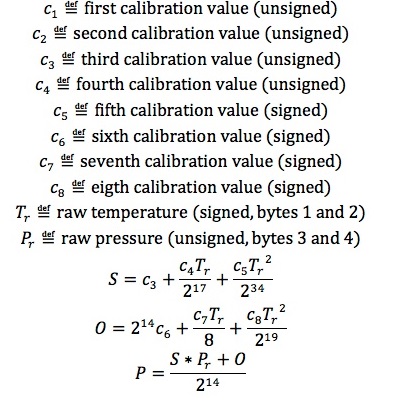
圧力センサーデータの気圧への変換式
Tempは温度でPressは圧力を示します。
圧力センサー「T5400」から入力した校正データ(Handle:0x52)を次の式にで設定し、圧力データ(Handle:0x4b)の2バイトのデータから生の圧力データを取り出して、次の計算式により圧力に変換します。Prは生の圧力データで、Trは生の温度データを示します。圧力は符号なしで、Pは、パスカル単位の圧力です。パスカルからバールに変換するには、「10000」で除算します。
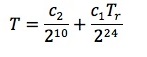
温度は符号を持ち、圧力データ(Handle:0x4b)の2バイトのデータから生の温度データを取り出して、次の計算式により温度に変換します。
圧力センサーデータ変換のプログラム
上記の圧力センサーの変換式をjava言語とC言語でコード化した例を示します。
java言語で記述すると次のようになります。
/* Conversion algorithm for barometer temperature
*
* Formula from application note, rev_X:
* Ta = ((c1 * Tr) / 2^24) + (c2 / 2^10)
*
* c1 - c8: calibration coefficients the can be read from the sensor
* c1 - c4: unsigned 16-bit integers
* c5 - c8: signed 16-bit integers
*/
private double calcBarTmp(int rawT)
{
long m_raw_temp = rawT;
long temp, val;
val = ((long) (c1 * m_raw_temp) * 100);
temp = (val >> 24);
val = ((long) c2 * 100);
temp += (val >> 10);
return ((double) temp) / 100;
}
/* Conversion algorithm for barometer pressure (hPa)
*
* Formula from application note, rev_X:
* Sensitivity = (c3 + ((c4 * Tr) / 2^17) + ((c5 * Tr^2) / 2^34))
* Offset = (c6 * 2^14) + ((c7 * Tr) / 2^3) + ((c8 * Tr^2) / 2^19)
* Pa = (Sensitivity * Pr + Offset) / 2^14
*/
private double TcalcBarPress(int rawT)
{
long s, o, pres, val;
long Pr;
int Tr;
Pr = rawT;
// Tr = m_raw_temp;
Tr = 8;
// Sensitivity
s = (long) c3;
val = (long) c4 * Tr;
s += (val >> 17);
val = (long) c5 * Tr * Tr;
s += (val >> 34);
// Offset
o = (long) c6 << 14;
val = (long) c7 * Tr;
o += (val >> 3);
val = (long) c8 * Tr * Tr;
o += (val >> 19);
// Pressure (Pa)
pres = ((long) (s * Pr) + o) >> 14;
return (double) pres / 100;
}
// #define BUILD_UINT16(loByte, hiByte) ((uint16)(((loByte) & 0x00FF) + (((hiByte) & 0x00FF) << 8)))
private void storeCalibrationData(int[] pData)
{
c1 = (pData[0] & 0x00FF) | ((pData[1] & 0x00FF) << 8);
c2 = (pData[2]) | ((pData[3] & 0x00FF) << 8);
c3 = (pData[4]) | ((pData[5] & 0x00FF) << 8);
c4 = (pData[6]) | ((pData[7] & 0x00FF) << 8);
c5 = (pData[8]) | ((pData[9] & 0x00FF) << 8);
c6 = (pData[10]) | ((pData[11] & 0x00FF) << 8);
c7 = (pData[12]) | ((pData[13] & 0x00FF) << 8);
c8 = (pData[14]) | ((pData[15] & 0x00FF) << 8);
}
C言語で記述すると次のようになります。
/* Conversion algorithm for barometer temperature
*
* Formula from application note, rev_X:
* Ta = ((c1 * Tr) / 2^24) + (c2 / 2^10)
*
* c1 - c8: calibration coefficients the can be read from the sensor
* c1 - c4: unsigned 16-bit integers
* c5 - c8: signed 16-bit integers
*/
double calcBarTmp(uint16 rawT)
{
uint16 c1, c2;
c1 = m_barCalib.c1;
c2 = m_barCalib.c2;
m_raw_temp = rawT;
int64 temp, val;
val = ((int64)(c1 * m_raw_temp) * 100);
temp = (val >> 24);
val = ((int64)c2 * 100);
temp += (val >> 10);
return ((double)temp) / 100;
}
/* Conversion algorithm for barometer pressure (hPa)
*
* Formula from application note, rev_X:
* Sensitivity = (c3 + ((c4 * Tr) / 2^17) + ((c5 * Tr^2) / 2^34))
* Offset = (c6 * 2^14) + ((c7 * Tr) / 2^3) + ((c8 * Tr^2) / 2^19)
* Pa = (Sensitivity * Pr + Offset) / 2^14
*/
double TcalcBarPress(uint16 rawT)
{
int64 s, o, pres, val;
uint16 c3, c4;
int16 c5, c6, c7, c8;
uint16 Pr;
int16 Tr;
Pr = rawT;
Tr = m_raw_temp;
c3 = m_barCalib.c3;
c4 = m_barCalib.c4;
c5 = m_barCalib.c5;
c6 = m_barCalib.c6;
c7 = m_barCalib.c7;
c8 = m_barCalib.c8;
// Sensitivity
s = (int64)c3;
val = (int64)c4 * Tr;
s += (val >> 17);
val = (int64)c5 * Tr * Tr;
s += (val >> 34);
// Offset
o = (int64)c6 << 14;
val = (int64)c7 * Tr;
o += (val >> 3);
val = (int64)c8 * Tr * Tr;
o += (val >> 19);
// Pressure (Pa)
pres = ((int64)(s * Pr) + o) >> 14;
return (double)pres/100;
}
#define BUILD_UINT16(loByte, hiByte) ((uint16)(((loByte) & 0x00FF) + (((hiByte) & 0x00FF) << 8)))
void storeCalibrationData(uint8 *pData)
{
m_barCalib.c1 = BUILD_UINT16(pData[0],pData[1]);
m_barCalib.c2 = BUILD_UINT16(pData[2],pData[3]);
m_barCalib.c3 = BUILD_UINT16(pData[4],pData[5]);
m_barCalib.c4 = BUILD_UINT16(pData[6],pData[7]);
m_barCalib.c5 = BUILD_UINT16(pData[8],pData[9]);
m_barCalib.c6 = BUILD_UINT16(pData[10],pData[11]);
m_barCalib.c7 = BUILD_UINT16(pData[12],pData[13]);
m_barCalib.c8 = BUILD_UINT16(pData[14],pData[15]);
}